2024.05.12 (일)
 속초14.6℃
속초14.6℃ 9.1℃
9.1℃- 철원8.9℃
- 동두천11.7℃
- 파주11.3℃
 대관령10.4℃
대관령10.4℃- 춘천9.8℃
- 백령도10.4℃
- 북강릉13.3℃
- 강릉15.7℃
- 동해15.2℃
 서울12.6℃
서울12.6℃- 인천11.7℃
 원주14.1℃
원주14.1℃ 울릉도16.4℃
울릉도16.4℃- 수원10.6℃
- 영월14.7℃
- 충주13.6℃
- 서산10.4℃
 울진17.4℃
울진17.4℃- 청주13.1℃
- 대전12.3℃
- 추풍령13.0℃
- 안동16.3℃
- 상주15.3℃
- 포항18.7℃
- 군산12.4℃
- 대구17.2℃
- 전주14.8℃
- 울산17.2℃
- 창원16.9℃
- 광주15.9℃
- 부산17.4℃
- 통영18.1℃
- 목포15.5℃
- 여수17.6℃
- 흑산도13.2℃
- 완도16.7℃
- 고창14.6℃
- 순천16.1℃
- 홍성(예)10.7℃
- 11.1℃
- 제주17.5℃
- 고산16.0℃
- 성산18.6℃
- 서귀포17.7℃
- 진주16.6℃
- 강화10.8℃
- 양평11.6℃
- 이천12.1℃
- 인제9.3℃
- 홍천11.0℃
- 태백14.2℃
- 정선군14.1℃
- 제천13.5℃
- 보은12.5℃
- 천안10.7℃
- 보령11.0℃
- 부여11.8℃
- 금산13.5℃
- 12.6℃
- 부안14.5℃
- 임실14.3℃
- 정읍14.5℃
- 남원15.2℃
- 장수14.7℃
- 고창군14.1℃
- 영광군14.5℃
- 김해시16.9℃
- 순창군14.6℃
- 북창원17.7℃
- 양산시17.9℃
- 보성군17.5℃
- 강진군16.8℃
- 장흥17.2℃
- 해남16.4℃
- 고흥17.6℃
- 의령군17.1℃
- 함양군16.9℃
- 광양시17.1℃
- 진도군15.7℃
- 봉화16.3℃
- 영주15.4℃
- 문경14.9℃
- 청송군16.6℃
- 영덕18.5℃
- 의성17.3℃
- 구미16.4℃
- 영천17.4℃
- 경주시17.7℃
- 거창16.1℃
- 합천17.2℃
- 밀양16.9℃
- 산청16.2℃
- 거제17.9℃
- 남해17.7℃
- 17.8℃


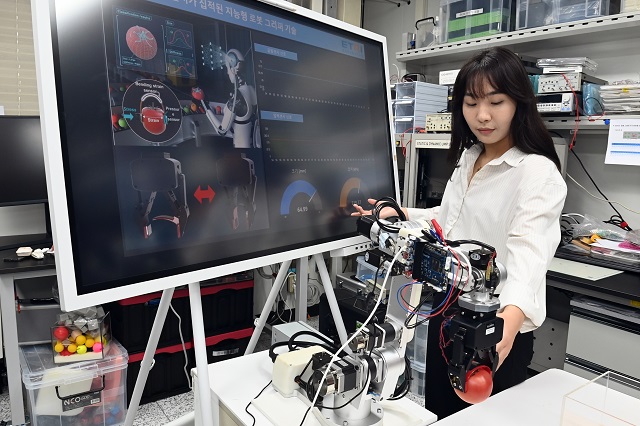
국내 연구진이 인공지능을 활용해 사물을 움켜잡아 물성을 파악하고 적절한 힘으로 제어할 수 있는 기술을 개발해 로봇기술의 미래를 활짝 열고 있다. 개발된 기술은 로봇이 토마토를 움켜쥐어 크기, 신선도, 촉감까지 판단한다.
한국전자통신연구원(ETRI)은 유연한 멀티모달 센서를 활용해 다양한 물체의 크기, 형상, 물성을 정확하게 인지하고 효과적으로 제어할 수 있는 지능형 로봇 그리퍼를 개발했다고 밝혔다.
해당 기술은 9월 30일 인공지능 분야의 저명한 학술지인 ‘어드밴스드 인텔리전트 시스템즈’ 온라인에 게재됐다. 향후 본 기술은 운송, 의료, 제조, 우주 산업 등 다양한 자동화 산업 영역에 효과적으로 적용될 전망이다.
ETRI는 새로운 차세대 로봇 그리퍼 기술을 개발해 기존 로봇 그리퍼의 수동적 제어 시스템의 문제점을 극복하고 물체의 크기와 물성을 정확하게 감지하며 능동적으로 피드백을 제공할 수 있는 기술을 발표했다.
일상생활에서 채소나 과일을 손으로 눌러보면 무른지 단단한지 알 수 있는 것처럼 유연 멀티모달 촉각센서를 활용하면 물체의 초기 크기와 변형의 정도를 감지, 물체의 정확한 물성을 판단할 수 있다. 이를 기반으로 물체를 최적의 힘으로 잡거나 옮길 수 있게 된다. 유연 멀티모달 센서는 감지소재와 전극 사이의 에어갭을 미세하게 조절해 압력 및 굽힘센서의 감지 범위와 민감도를 선택적으로 조절하게 개발됐다.
또한 로봇 그리퍼에 장착하고 물체에 가해지는 압력과 그리퍼의 굽힘 정도를 동시에 감지해 물체의 영률(단단한 정도)을 정확하게 판단한다. 이 센서는 보호층과 인터페이스 공정을 최적화해 1만 번 이상의 반복 압력과 굽힘 반복 시험 후에도 매우 안정적인 성능을 보였다. 아울러 저온 및 고습 환경에 대한 신뢰성도 검증됐다.
연구진은 멀티모달 촉각센서가 집적된 지능형 로봇 그리퍼가 다양한 크기와 물성을 갖는 토마토 11종을 98.78%의 정확도로 구분했다고 설명했다. 이로써 시간에 따라 완숙 여부가 달라지는 토마토의 숙성도까지 실시간 선별해낼 수 있다. 아울러 지능형 로봇 그리퍼는 유연 멀티모달 센서를 통해 어떤 물체를 집는지 능동적으로 이해하고 안정적으로 물체를 파지하는 시점을 결정하며 상응하는 그리퍼의 힘(토크)을 조절해 피드백을 제공한다.
연구진은 본 기술이 ▲대면적 고유연 다종센서 집적 기판 플랫폼 ▲에어갭 구조 기반의 고유연 멀티모달(압력/굽힘) 센서 ▲물체의 크기, 형상, 물성 등을 판별하는 인공지능 알고리즘 모델 ▲로봇 그리퍼의 촉각 피드백 제어 기술 등이 결합된 결과라고 밝혔다.
김혜진 ETRI 지능형부품센서연구실 책임연구원은 “개발한 촉각센서는 로봇 그리퍼에 다양한 촉각 기능을 부여해 자동화 라인 및 협업 로봇 분야에서 혁신적인 응용 가능성을 제시한다”고 말했다.
향후 연구진은 압력과 굽힘을 감지하는 2종 센서 외에도 온/습도센서, 관성센서, 거리센서 등을 하나의 센서 플랫폼으로 집적하는 기술을 개발할 예정이다. 또한 다종의 센서가 집적된 유연 인장형 멀티모달 인공피부를 로봇 그리퍼에 적용함으로써 사람처럼 빠르고 자연스러운 동작이 가능한 차세대 지능형 그리퍼 기술을 개발키로 했다. 연구진은 본 기술을 자동화 산업 관련 기업에 기술이전해 상용화를 위해 노력할 계획이다.
한편 해당 기술은 산업통상자원부와 한국산업기술평가원(KEIT)의 ‘자유형상 고집적 융복합센서를 위한 유연인장 하이브리드 센서 플랫폼 기술 개발’ 과제로 수행됐다.

![[특집-ISO/IEC JTC 1/SC 17 활동] 35. Result of voting on SR Ballot for ISO/IEC 7811-7(N 7345)](http://stdnews.kr/data/file/news/thumb-3555379571_4cufp2BH_756bcefa64e6169e58646ad7b061ecbec455fb11_118x78.jpg "[특집-ISO/IEC JTC 1/SC 17 활동] 35. Result of voting on SR Ballot for ISO/IEC 7811-7(N 7345)")

 대응 기반(인프라)구축 지원사업 참여기업 2차 모집개시")

![[잘난척아는척TV] 충전기 타입이 자꾸 바뀌는 이유](http://stdnews.kr/data/file/news/thumb-661839498_b09ltrRW_d5e36bb7755deae8f2d0fd06db3041a3e97ed9f8_118x78.jpg "[잘난척아는척TV] 충전기 타입이 자꾸 바뀌는 이유")
![[특집-기상기후재난] 한국중부발전(주) 신정철 선임 인터뷰 - 행정안전부 뿐 아니라 기상기후 연계조직 모두가 참여하는 협의체가 돼야](http://stdnews.kr/data/file/news/thumb-3555374516_iKWwUBas_9c1729f1e3977ee50c398986e7f98d5002a57deb_118x78.jpg "[특집-기상기후재난] 한국중부발전(주) 신정철 선임 인터뷰 - 행정안전부 뿐 아니라 기상기후 연계조직 모두가 참여하는 협의체가 돼야")

![[잘난척아는척TV] 평생 아무도 알려주지 않은 첫째 주 목요일은 언제일까?](http://stdnews.kr/data/file/news/thumb-2948726586_UkXaF364_18ad3c8e673eb23da0e5df66ebf7fd2a8317fdb4_190x190.jpg "[잘난척아는척TV] 평생 아무도 알려주지 않은 첫째 주 목요일은 언제일까?")
명칭(제호) | 표준뉴스 | 등록번호 : 서울 아 54185 | 등록일자 : 2022년 3월 16일 | 발행일자 : 2022년 1월 3일 | 전화번호 : 02-780-1057
발행인 : 오남성 | 편집인 : 박재희 | 주소 : 서울특별시 영등포구 63로 40 (여의도동 61-3) 라이프오피스텔 529호
Copyright©2021 표준뉴스 All Right Reserved

최종편집: 2024.05.09 11:46